
更新时间:1小时前
张钲杨
男|
23岁|
本科|
无经验 |身高175CM |未婚 |机械类
现居住:福建省三明市
户籍:福建三明
诚实守信
有上进心
求职意向
期望职位:机电工程师,机械工程师|全职
期望行业:机械/设备/重工,医疗设备/器械
期望薪资:5K~10K/月|想在江宁区,溧水县,浦口区工作
求职状态:我目前已离职,可快速到岗
期望行业:机械/设备/重工,医疗设备/器械
期望薪资:5K~10K/月|想在江宁区,溧水县,浦口区工作
求职状态:我目前已离职,可快速到岗
获取联系方式
自我描述
本人大学期间参加创新创业工作室,学习了机械,电子,嵌入式开发的基本知识,并主要往机电方向深入学习,期间有多次项目参与经验,大二开始作为项目负责人开发项目,并加入管理层学习了部分相关知识,积攒了部分工作经验,具备较强的学习能力以及抗压能力。毕业设计仅一人从头负责机器人建模设计,控制板的pcb设计,物联网连接控制以及实物搭建实验。本人团队意识强,能够积极沟通,作为项目负责人期间学习过机器学习,前后端开发等相关基础知识,在团队中能有效沟通,根据其他方向需求进行机电方向调整。大学期间获得过奖学金以及竞赛国奖,有一定外出路演以及应变突发事件的能力。
教育经历
2021-9 至 2025-6
[3年9个月]
[3年9个月]
本科|郑州轻工业大学|机械设计制造及其自动化
工作经历(TA工作了5个月,共做了1份工作)
2023-5 至 2023-10
[5个月]
[5个月]
宣传负责人&BR组组长|梅科尔创新创业工作室
工作职责:在职宣传负责人事务:负责工作室在校宣传事宜(新媒体管理、招新等);工作室与华为、欧特克软件(中国)公司、欧洲航天局
等企业或部门的对外交流安排。
生物医电与康复工程组组长事务:负责组内事务的管理与汇报、比赛规划、各项目的推进监督以及人事管理(绩效、晋升、监察)。
项目经历
2023-9 至 2024-1
[4个月]
[4个月]
发明专利《一种用于地底电缆巡检的四自由度折纸软体机器人》|第二作者
项目描述:公开号:CN117359601A
专利内容:通过仿生鳞翅目幼虫爬行过程,设计一款可以实现蠕动式爬行且各种运动效果的软体机器人
主要工作:负责前期资料的收集和统计,部分结构内容与全部运动控制方案内容的编写,并根据一作与审稿人的意见进行优化。信息检索能力和文章写作能力增强,熟悉了专利发表流程。
2022-11 至 2023-10
[11个月]
[11个月]
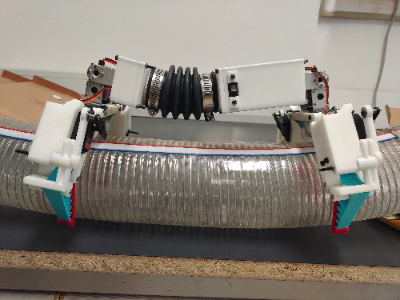
基于多模态折纸结构的软体机器人|项目负责人
项目描述:项目内容:该项目主要是通过折纸软体驱动器的多种姿态转换和稳定的闭环控制系统,来适应地下复杂的巡检环境;通过视觉识别,定位破损位置,并基于获取的地底信息,构建地底管网监控系统,为用户提供“巡检存查”一站式线缆巡检解决方案。
主要工作:本人在该项目中主要负责进行项目的规划和推进,前期主要进行科研投入:主要负责结构设计优化以及气路电路的设计搭建;中后期除了项目各模块规划外,也开始投入合作交接、知识产权申请等工作。
2022-3 至 2022-8
[5个月]
[5个月]
用于脑卒中患者康复的STS坐站转换下肢外骨骼|项目成员
项目描述:该项目主要是针对脑卒中患者进行设计的康复外骨骼,通过对人体膝盖处的运动方式进行数学建模,
设计了仿生的凸轮式关节,为患者提供更加舒适的坐站康复体验和效果。
本人在该项目负责凸轮结构以及外骨骼构型的设计,并进行Recurdyn动力学仿真来进行优化设计。
2022-8 至 2023-2
[6个月]
[6个月]
基于ROS系统的咽拭子检测软体机器人|项目成员
项目描述:该项目主要是针对疫情背景下的咽拭子采样进行设计的软体机械臂结构,通过带传动机械臂和软体复
合机械臂实现宏微观控制效果。
本人在该项目中负责带传动机械臂的Recurdyn运动学仿真和软体机械臂Abaqus有限元仿真,以此
来进行结构优化,同时进行软体机械臂的气路设计和电路控制代码逻辑设计。
2024-12 至 2025-5
[5个月]
[5个月]
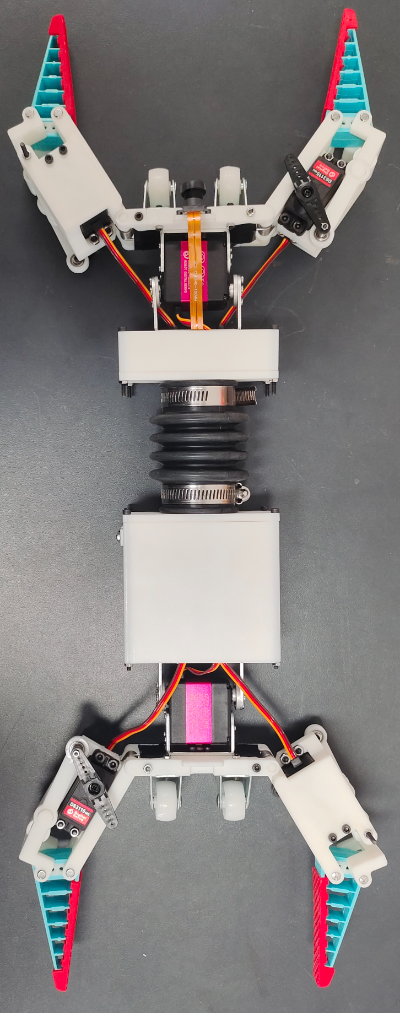
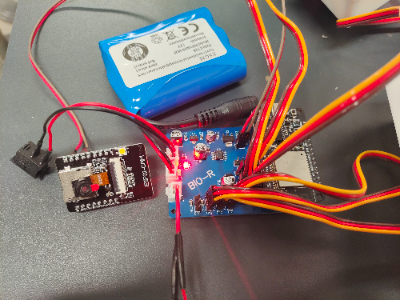
煤矿巷道电缆高通过性蠕动巡检机器人设计|毕设个人开发
项目描述:项目内容:基于仿生原理,实现巡检机器人的结构设计,并进行关键结构稳定性的仿真分析,进而开发出机器人的控制系统,最终提出了一款机电一体化的高通过性变刚度蠕动巡检机器人的整体设计方案。
主要技术:SW三维设计、CAD工程图绘制、ABAQUS有限元仿真、Arduino程序编写、EDA电路设计与电路调试。
获得证书
2024-12CET-4
照片/作品

附件简历
就职简历-张钲杨.pdf(获取简历联系方式以后方可下载)
